 订阅
订阅UG仿真运动过程中相同运动副的简化
来源:网络收集 点击: 时间:2025-11-16【导读】:
设备机构在设计过程中存在多个相同运动特征,在使用UG软件进行仿真时,可以将这些特征设置为同一连杆,使其保证相同运动,从而简化仿真过程。 本例以一个简单的翻转机构为例进行说明。
分析结构特性,将相同运动特征工件预置于相同图层,方便后期连杆创建。

进入仿真运动环境 按照提前预置的图层分别将六部分设置成六个独立的连杆。其中机架设置为固定连杆。

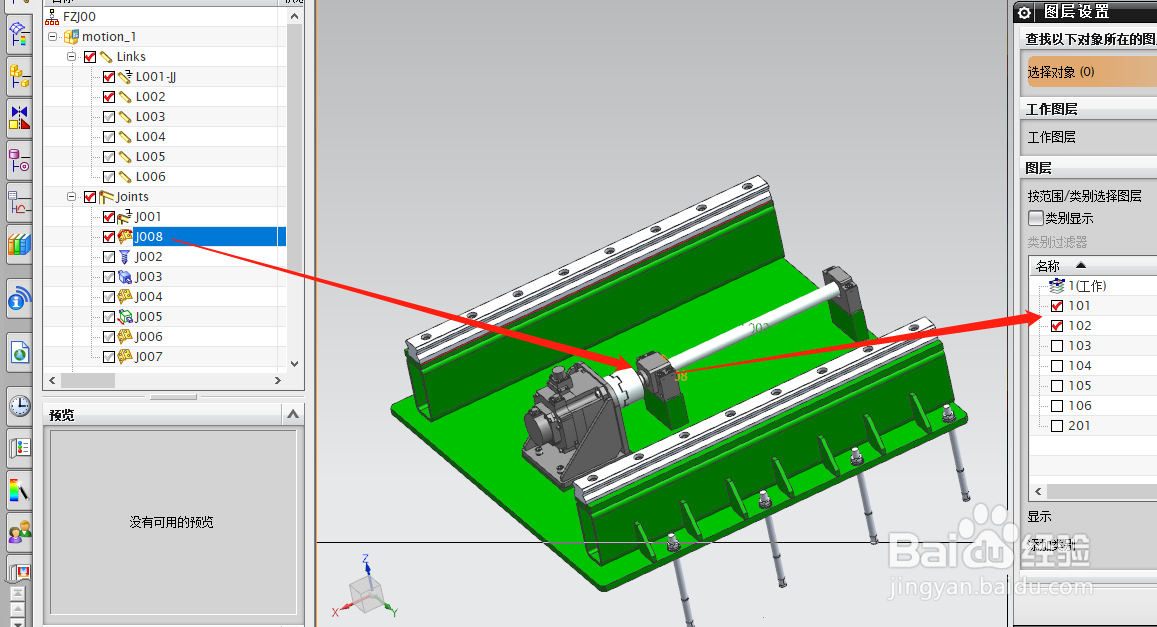
从机架开始,依各连杆件的接触运动方式,依次设置各个运动副——旋转副/滑动副/螺旋副/旋转副/滑动副/旋转副/旋转副(注:本处螺杆与滑架间的螺旋副比率设置为3,注意保证啮合连杆的位置和矢量相同)
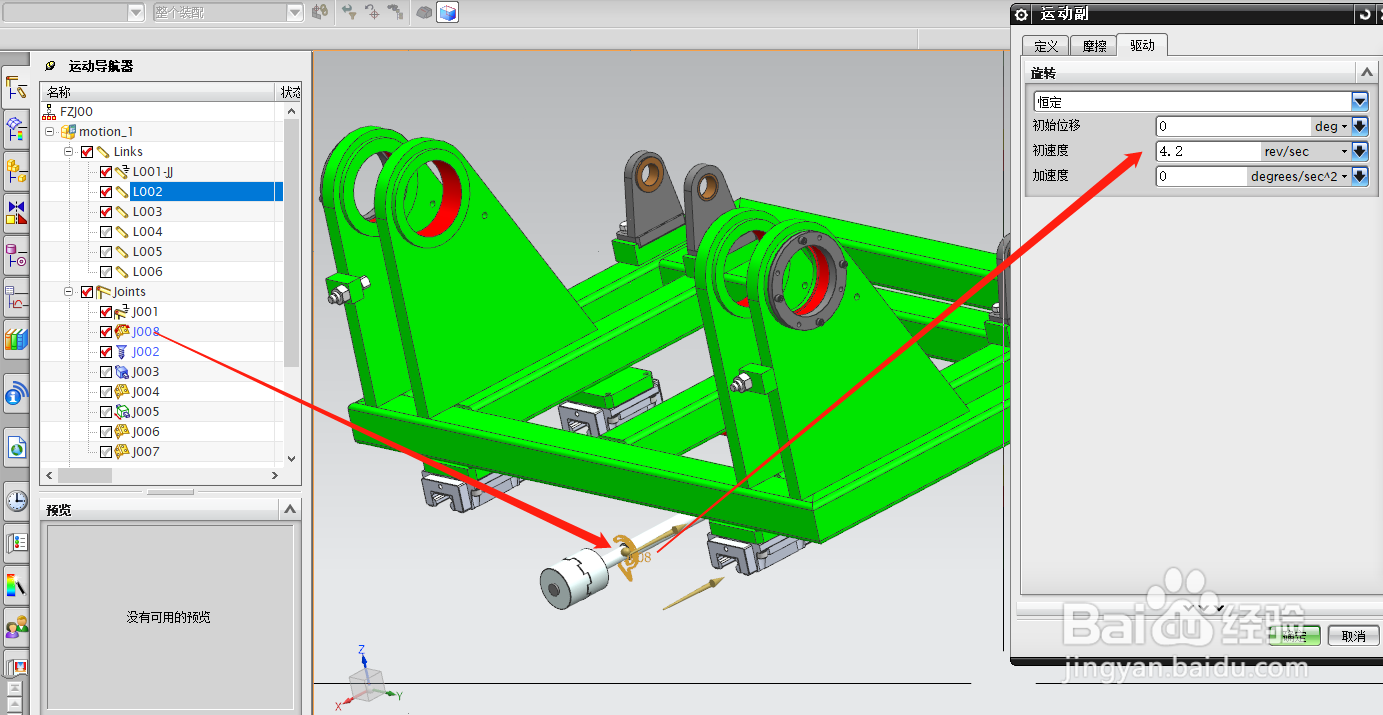
设置运动参数和解算条件(螺杆恒转速4.2转/s 油缸速度20mm/s 模拟时长24s)
解算并分析运动结果(依需可增加测量位置,测量丝杠和油缸的变化等)

版权声明:
1、本文系转载,版权归原作者所有,旨在传递信息,不代表看本站的观点和立场。
2、本站仅提供信息发布平台,不承担相关法律责任。
3、若侵犯您的版权或隐私,请联系本站管理员删除。
4、文章链接:http://www.ff371.cn/art_1283028.html
上一篇:AI教程:[235]怎样绘制六棱柱?
下一篇:LOL紫色海克斯宝箱怎么获取